软组织肿瘤细胞图像形态学边缘检测
 作者
作者
摘要:针对软组组肿瘤细细胞形态学特性,在灰度形态学的基础上,提出了一种基于 L*a*b*色彩空间的形态学数字图像处理理论,并给出了彩色模式下多结构元素、多尺度的软组织肿瘤细胞的边缘检测算法。实验结果表明,该算法很好的利用 L*a*b*色彩空间的特性和形态学特点,对形态学梯度算子加以修正,提取的边缘完整、连续,且图像边缘的细节丰富、边缘定位准确。
关键词:L*a*b*;形态学;软组织肿瘤;边缘检测
中图分类号:F27
文献标识码:A
文章编号:16723198(2015)13008802
1 基于 L*a*b*色彩空间的形态学定义
设 V(x)为 L*a*b*空间的彩色图像,V(x)=(L(x),A(x),B(x)),其中,100≥L(x)≥0,128≥A(x)≥-128,128≥B(x)≥-128,x∈Dv,且 Dv 是 V(x)的定义域,Dv∈Z2,Z 是整数集合。
定义 1:对 L*a*b*空间的彩色图像{V(x);x∈X,X∈Dv},定义 3 个分量算子 Ψl(),Ψa(),Ψb()分别为彩色图像的亮度分量、绿到红的色彩分量和蓝到黄的色彩分量。
定义 2:定义 min(或 max)为最小(或最大)运算,在 Lab 彩色空间,约定 L(x)的优先级别最高,其次为 A(x)最后为 B(x)。
(a)若{L(x),x∈X}存在唯一的最小值(或最大值),则
min{V(x)}={V(aL);aL=argmin{L(x),x∈X}(1)
或
max{V(x)}={V(aL);aL=argmax{L(x),x∈X}(2)
其中 argmin 和 argmax 结果分别为所给集合中最小值点和最大值点的位置。
(b)若{L(x),x∈X}中有 m 个相同的最小值(或最大值),这些最小值(或最大值)位于点 xn1,xn2,…..,xnm,构成 XL 集。并且在{A(x),x∈XL}中只有一个最小值(或最大值)。
那么
min{V(x)}={V(aA);aA=argmin{A(x),x∈XL}}(3)
或
max{V(x)}={V(aA);aA=argmax{A(x),x∈XL}}(4)
(c)同样若在{A(x),x∈XL}中有 M 个相同的最小值(或最大值)分别位于点 xn1,xn2,…..,xnm,构成 XA 集,XA∈XL∈X,那么
min{V(x)}={V(aB);aB=argmin{B(x),x∈XA}}(5)
或
max{V(x)}={V(aB);aB=argmax{B(x),x∈XA}}(6)
假定用 card()表示集合的势,则有:card(XA)≤card(XL)≤Card(X),card(XA)=M,card(XL)=m。
定义 3:对彩色图像 V1(x)=(L1(x),A1(x),B1(x))和 V2(x)=(L2(x),A2(x),B2(x)):x∈X,则 V1-V2 的定义如下:
V1(x)-V2(x)={L1(x)-L2(x),A1(x)-A2(x),B1(x)-B2(x)}(7)
定义 4:V(x)关于结构元素 P 的彩色形态膨胀 VcP 与彩色形态腐蚀 VΘcP 的定义如下:
VΘcP(s,t)=min{V(s+x,t+y)-P(x,y)|(s+x,t+y)∈Dv,(x,y)∈Dp}(8)
VcP(s,t)=max{V(s-x,t-y)+P(x,y)|(s-x,t-y)∈Dv,(x,y)∈Dp}(9)
其中,Dv 和 Dp 分别是 V(x)和结构元素 P(y)的定义域。在实际运算中,腐蚀和膨胀通常使用平坦的结构元素来执行,在这种结果元素中,P 的值在定义域 Dp 内的所有坐标处的值均为 0,即 Pl(x』,y』)=0、Pa(x』,y』)=0、Pb(x』,y』)=0,(x』,y』)∈Dp。Pl、Pa、Pb 分别表示 P 的 L、a、b 分量。
在这种情况下,彩色图像的腐蚀、膨胀运算可以简化为:
VΘcP(s,t)=min{V(s+x,t+y)|(s+x,t+y)∈Dv,(x,y)∈Dp}(10)
VcP(s,t)=max{V(s-x,t-y)|(s-x,t-y)∈Dv,(x,y)∈Dp}(11)
定义 5:结合彩色膨胀和腐蚀,可得到彩色形态开和彩色形态闭,V○cP 和 V●cP 的定义如下:
V○cP=VΘcPcP(12)
V●cP=VcPΘcP(13)
2 基于彩色形态学脂肪性肿瘤细胞的边缘检测算法
2.1 边缘检测算子
设 V(x)为输入的彩色图像,P(x)为结构元素,则有:
基于腐蚀运算的彩色图像梯度边缘检测算子:
Ge(x)=(V-VΘcP)(x)(14)
基于膨胀运算的彩色图像梯度边缘检测算子:
Gd(x)=(VcP-V)(x)(15)
基于腐蚀和膨胀复合运算的彩色图像梯度学边缘检测算子:
Gde(x)=(VcP-VΘcP)(x)(16)
结合膨胀、腐蚀运算梯度边缘检测算子的特性,我们对上述梯度边缘检测算子加以修正,令:
Gmin(x)=min{Ge(x),Gd(x),Gde(x)}
Gmax(x)=max{Ge(x),Gd(x),Gde(x)}
Gdec(x)=Gmax(x)-Gmin(x)
(17)
则:
G(x)=(2/3)Gde(x)+(1/3)Gdec(x)(18)
为新定义的彩色图像形态学梯度边缘检测算子。
2.2 结构元素选取
一个结构元素只对与其同方向的边缘敏感,而与其不同方向的边缘则会被平滑掉。考虑到不同性质的边缘,设计了包含 0°、45°、90°、135° 四个方向以及一个菱形的 3×3 全方位结构元素,如图 1 所示,它们基本能涵盖各个方向的边缘。
图 1 本文所采用的结构元素
如果采用不同尺度结构元素对图像进行边缘检测,则既可以较好地提取图像的细节特征,又能有效地抑制噪声。
假设结构元素 P 由小结构元素 S 和 K 经膨胀运算得到即:
P=ScK
则:
Ge(x)=(V-VΘcP)(x)=(V-VΘc(ScK))(x)
由性质 8 可以得到
Ge(x)=(V-VΘcSΘcK)(x)
同理:
Gd(x)=(VcScK-V)(x)
Gde(x)=(VcScK-VΘcSΘcK)(x)
若结构元素 P 可由 n 个相同的结构元素 B(B 为有限结构元素)经 n 次膨胀得出,即:
P=nB=BcBcB…cB
则有:
Ge(x)=(V-VΘcBΘc…ΘcB)(x)
Gd(x)=(VcBcB…cB-V)(x)
Gde(x)=(VcBcB…cB-VΘcBΘc…ΘcB)(x)
(19)
由上式我们可以看出三种梯度边缘算子的计算转化为由结构元素膨胀和腐蚀次数 n 的问题。这里我们称 n 为多尺度结构元素的尺度。
结合 18 式得到多尺度彩色图像的边缘检测算子 Gcde 为:
Gcde=∑ni=1wiGi(20)
式中:wi(i=1,2…n)为对应尺度 i 时的权值,Gi 为对应尺度 i 时求得的图像梯度边缘。
wi 权值的确定:
首先,求出各个尺度的作用下的均值梯度边缘 Gavg:
Gavg=1n∑ni=1Gi(21)
其次,计算不同尺度的标准差和方差 Δi 和 Δi2:
Δi=GiGavg(22)
Δ2i=GiGavg2(23)
由彩色图像差的定义,Gi-Gavg 为对应图像各个分量的差,即:
Gi-Gavg={LGi-LGavg,AGi-AGavg,BGi-BGavg}
则:
Gi-Gavg=|{LGi-LGavg,AGi-AGavg,BGi-BGavg}|
在本算法中,取各分量的标准差的最大值作为整幅图像的标准差,即:
Δi=Gi-Gavg=max(LGi-LGavg,AGi-AGavg,BGi-BGavg)
同理:
Δ2i=Gi-Gavg2=max(LGi-LGavg2,AGi-AGavg2,BGi-BGavg2
进而确定权系数 wi 为:
wi=(∑nj=1Δj)Δi2×∑nj=1Δj 或 wi=(∑nj=1Δ2j)Δ2i2×∑nj=1Δ2j(24)
2.3 实验结果分析
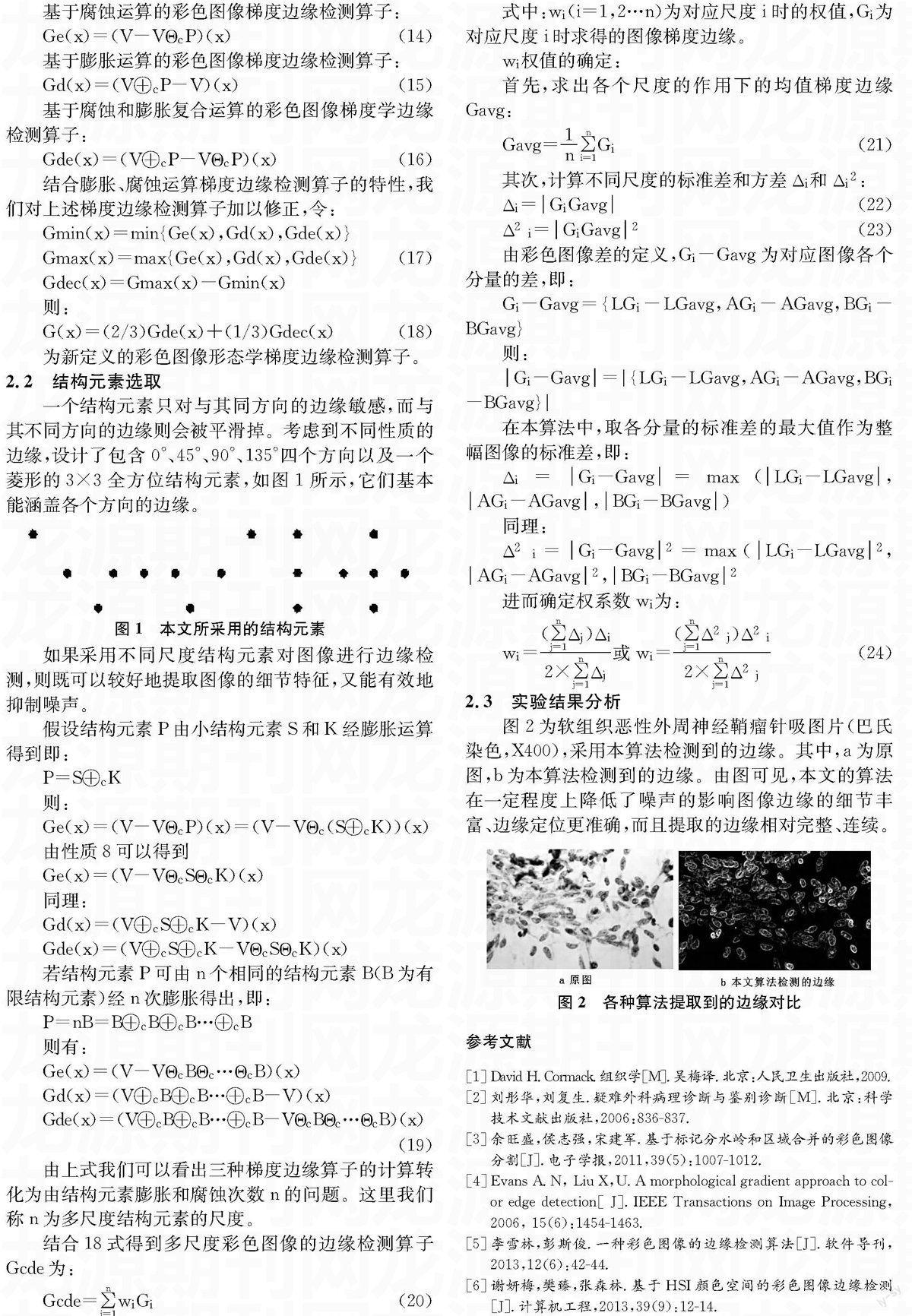
图 2 为软组织恶性外周神经鞘瘤针吸图片(巴氏染色,X400),采用本算法检测到的边缘。其中,a 为原图,b 为本算法检测到的边缘。由图可见,本文的算法在一定程度上降低了噪声的影响图像边缘的细节丰富、边缘定位更准确,而且提取的边缘相对完整、连续。
图 2 各种算法提取到的边缘对比
参考文献
[1]David H.Cormack.组织学[M].吴梅译.北京:人民卫生出版社,2009.
[2]刘彤华,刘复生.疑难外科病理诊断与鉴别诊断[M].北京:科学技术文献出版社,2006:836837.
[3]余旺盛,侯志强,宋建军.基于标记分水岭和区域合并的彩色图像分割[J].电子学报,2011,39(5):10071012.
[4]Evans A.N, Liu X,U.A morphological gradient approach to color edge detection[ J].IEEE Transactions on Image Processing,2006, 15(6):14541463.
[5]李雪林,彭斯俊.一种彩色图像的边缘检测算法[J].软件导刊,2013,12(6):4244.
[6]谢妍梅,樊臻,张森林.基于 HSI 颜色空间的彩色图像边缘检测[J].计算机工程,2013,39(9):1214.
作者 赵慧 周军